Chapter 3 Linear Mappings and Their Matrices
3.1 Linear Mappings
3.1.1.
Prove that is linear if and only if it satisfies (3.1) and (3.2). (It may help to rewrite (3.1) with the symbols and in place of and . Then prove one direction by showing that (3.1) and (3.2) are implied by the defining condition for linearity, and prove the other direction by using induction to show that (3.1) and (3.2) imply the defining condition. Note that as pointed out in the text, one direction of this argument has a bit more substance than the other.)
Proof:
Use induction, when ,
This is (3.2).
Then assume holds, we are checking .
To prove (3.1), set .
To prove (3.2), set .
3.1.2.
Suppose that is linear. Show that . (An intrinsic argument is nicer.)
Proof:
Note in both , . So
3.1.3
Fix a vector . Show that the mapping given by is linear, and that for .
Proof:
(3.1)
(3.2)
follows the definition of the inner product.
3.1.4
Find the linear mapping such that , , and .
Solution
We need to solve this equations
So .
3.1.5.
Complete the proof of the componentwise nature of linearity.
Proof:
For
If are linear, then
On the other hand, if is linear,
Then
So
3.1.6.
Carry out the matrix-by-vector multiplications
Solution:
(a)
(b)
(c)
(d)
3.1.7.
Prove that the identity mapping is linear. What is its matrix? Explain.
Proof
(3.1)
(3.2)
Then matrix is
3.1.8.
Let denote a fixed but generic angle. Argue geometrically that the mapping given by counterclockwise rotation by is linear, and then find its matrix.
Proof:
Geometrically is quite obvious.
Consider
Then matrix is
3.1.9.
Show that the mapping given by reflection through the x-axis is linear. Find its matrix.
Then matrix is
3.1.10.
Show that the mapping given by orthogonal projection onto the diagonal line is linear. Find its matrix. (See Exercise 2.2.15.)
Proof:
We can use vector to represent the diagonal line .
Then for
Also
So is linear.
Then matrix is
3.1.11.
Draw the graph of a generic linear mapping from to .
Solution: skip.
3.1.12.
Continue the proof of Proposition 3.1.8 by proving the other three statements about and satisfying (3.1) and (3.2).
Proof:
(3.2) for .
Next, (3.1) for .
Next, (3.2) for .
3.1.13.
If and , show that lies in .
Proof:
(3.1)
Next (3.2)
So .
3.1.14
(a) Let . Its transpose is the mapping
defined by the characterizing condition
Granting that indeed a unique such exists, use the characterizing condition to show that
by showing that
Proof:
Because can be arbitrary, so we have
(b) Keeping S from part (a), now further introduce , so that also . Show that the transpose of the composition is the composition of the transposes in reverse order,
by showing that
Proof:
3.1.15
A mapping is called affine if it has the form , where and . State precisely and prove: the composition of affine mappings is affine.
Proof:
If and are affine, then
3.1.16
Let be a linear mapping. Note that since is continuous and since the absolute value function on is continuous, the composite function
is continuous.
(a) Let . Explain why is a compact subset of . Explain why it follows that takes a maximum value on .
Proof: is bounded. Then we just need to show is closed.
Use "Sequential characterization of closed sets", assume .
Since is a continuous function and
Then .
So , then is closed. So is compact.
Then based on Theorem 2.4.15 (Extreme value theorem), takes a maximum value on .
(b) Show that for all . This result is the linear magnification boundedness lemma. We will use it in Chapter 4.
Proof:
3.1.17.
Let be a linear mapping.
(a) Explain why the set is compact.
Proof: See 3.1.16 (a)
(b) Use part (a) of this exercise and part (b) of the preceding exercise to explain why therefore the set has a maximum. This maximum is called the norm of and is denoted .
Proof:
See 3.1.16 (b).
(c) Explain why is the smallest value that satisfies the condition from part (b) of the preceding exercise, for all .
Proof:
First, we know from 3.1.16 (b), .
Next, we can find a point such that
(d) Show that for every and every ,
Define a distance function
Show that this function satisfies the distance properties of Theorem 2.2.8.
Proof:
(D1) .
Since , then .
if and only if .
(D2)
Because
(D3)
(e) Show that for every and every
Proof:
Assume
Let .
Therefore
3.2 Operations on Matrices
3.2.1.
Justify Definition 3.2.2 of scalar multiplication of matrices.
Solution:
The th column of is
$$ (αS)(e_j) = α (S(e_j)) = α \times \text{(th column of A)} $$
So it's reasonable to define .
3.2.2.
Carry out the matrix multiplications.
Solution: skipped.
3.2.3
Prove more of Proposition 3.2.5, that , , and for suitable matrices and any scalar .
Proof:
$$ } \ &= R(S(x)+T(x)) &\quad \text{by definition of } \ &= R(S(x)) + R(S(x)) &\quad \text{ is linear mapping} \ &= (R ◦ S)(x) + (R ◦ T)(x) &\quad \text{by definition of and } \end{align*} $$
$$ } \ &= α (S(T(x))) &\quad \text{by definition of } \ &= S(αT(x)) &\quad \text{ is linear} \ &= S((αT)(x)) &\quad \text{by definition of } \ &= (S◦(αT))(x) &\quad \text{by definition of } \\ \end{align*} $$
$$ } \\ &= A(x) &\quad \text{by definition of id} \\ \end{align*} $$
3.2.4.
(If you have not yet worked Exercise 3.1.14 then do so before working this exercise.)
Let be the matrix of Its transpose is the matrix of the transpose mapping . Since and act respectively as multiplication by and , the characterizing property of from Exercise 3.1.14 gives
Make specific choices of x and y to show that the transpose is obtained by flipping about its northwest–southeast diagonal; that is, show that the th entry of is .
It follows that the rows of are the columns of , and the columns of are the rows of .
Proof:
Given any , let .
Let .
Then , then .
On the other hand, , then .
So we proved.
(Similarly, let be the matrix of so that is the matrix of . Because matrix multiplication is compatible with linear mapping composition, we know immediately from Exercise 3.1.14(b), with no reference to the concrete description of the matrix transposes and in terms of the original matrices and , that the transpose of the product is the product of the transposes in reverse order,
That is, by characterizing the transpose mapping in Exercise 3.1.14, we easily derived the construction of the transpose matrix here and obtained the formula for the product of transpose matrices with no reference to their construction.)
3.2.5.
The trace of a square matrix is the sum of its diagonal elements,
Show that
Proof:
3.2.6
For every matrix and column vector , define the affine mapping (cf. Exercise 3.1.15)
by the rule for all , viewing as a column vector.
(a) Explain why every affine mapping from to takes this form.
Proof:
An affine mapping is this form: , and .
Since , then we can find matrix such that .
So .
(b) Given such and , define the matrix to be
Show that for all ,
Thus, affine mappings, like linear mappings, behave as matrix-by-vector multiplications but where the vectors are the usual input and output vectors augmented with an extra “1” at the bottom.
Proof:
For ,
Let
Then
Then
(c) The affine mapping determined by and has matrix
Show that
has matrix . That is, matrix multiplication is compatible with composition of affine mappings.
Proof:
First we know
Then
$$ from (b)} \\ &= \begin{bmatrix} \text{Aff}_{A, a} ( \text{Aff}_{B, b}(x) ) \\ 1 \\ \end{bmatrix} &\quad \text{Again from (b)} \\ &= \begin{bmatrix} (\text{Aff}_{A, a} \circ \text{Aff}_{B, b})(x) \\ 1 \end{bmatrix} &\quad \text{Definition of composition of maps.} \end{align*} $$
3.2.7.
The exponential of a square matrix is the infinite matrix sum
Compute the exponentials of the following matrices.
Solution:
(a)
(b)
$$ A^2 = \ =
$$
Then
(c)
So
(d)
So
Then
So
Then
So
Then finally
3.2.8.
Let be real numbers with . show that
Proof: Just regular matrix multiplication.
(b)
Let be real numbers with and . Show that
$$
$$
3.3 The Inverse of a Linear Mapping
3.3.2.
Finish the proof of Proposition 3.3.2.
Proof:
To prove (b), each row of is the row of . And of is .
3.3.4.
Finish the proof of Lemma 3.3.3, part (1).
Proof:
We need to prove
Note is the identity matrix with times it's th row, and multiplying this from the left by makes the th row back to be .
We also need to prove
Note is the identity matrix with swapping its th row with its th row, and multiplying this from the left by makes it back to .
3.3.5.
What is the effect of right multiplying the matrix by an matrix ?
Solution:
We can directly carry out the matrix multiplication and the effect is described in 3.3.6.
3.3.6.
Recall the transpose of a matrix (cf. Exercise 3.2.4), denoted . Prove ; ; .
Use these results and the formula to redo the previous problem.
Proof:
Let . Then we know, . So then it's easy to prove.
For the second part
So the effect is to use times th column and add to the th column.
So the effect is to use times th column of .
Similar, the effect is to swap the th and th column of .
3.3.7.
Are the following matrices echelon? For each matrix , solve the equation .
Solution:
(a) no, the last column is not a neither a new column nor an old column.
(b) (c) yes.
(d) No. The 2nd/3rd column should be swapped with the 1st row.
(e) The 3rd row should be subtract from the 2nd row.
(f) The 1st and 2nd row should be swapped.
3.3.8.
For each matrix solve the equation .
(a)
Solution:
Multiply by we got
Multiply by we got
Multiply by we got
Multiply by we got
Multiply by we got
Multiply by we got
Multiply by we got
Then can be one solution.
3.3.9.
Balance the chemical equation
Solution
So is a solution.
3.3.10.
Prove by induction that the only square echelon matrix with all new columns is the identity matrix.
Proof:
Assume this is true for , i.e. .
Consider echelon matrix. Since the last column is a new column, then
If any column of is not a new column, then it does not have a leading 's. Then that column does not have a leading 's in either. So it's not a new column in . We have a contradiction.
So every column in is a new column, and since its size is , then . So .
3.3.11.
Are the following matrices invertible? Find the inverse when possible, and then check your answer.
Solution:
We check (b)
Apply
Apply
Apply
So it's not invertible.
3.3.12.
The matrix is called lower triangular if whenever . If is a lower triangular square matrix with all diagonal entries equal to , show that is invertible and takes the same form.
Proof:
We can mutiply with to get the first column to become a new column, let the new matrix be . And the right half be . Then is still a lower triangular.
Similarly, we can mutiply with to get and which are also lower triangular.
Eventually, we can get and , which are also lower triangular.
3.3.13.
This exercise refers back to the Gram–Schmidt exercise in Chapter 2. That exercise expresses the relation between the vectors and the vectors formally as , where is a column vector whose entries are the vectors , is the corresponding column vector of ’s, and is an lower triangular matrix.
Show that each has the form
and thus every linear combination of the original is also a linear combination of the new .
Proof:
Since is lower triangular matrix, from 3.3.12, is invertible, and is also a lower triangular matrix, such that
If we expand it, we have
3.5 The Determinant: Characterizing Properties and Their Consequences
3.5.1
Solution:
Assume , then
Then
3.5.2
Proof:
If it's the last 3 cases, then only the last pair-exchange involves the th slot. So the element will be swapped to another location.
So it won't be the ordered set.
3.5.4.
This exercise shows that for every square matrix .
(b) If is a square echelon matrix then either or the bottom row of is . In either case, show that . (For the case , we know that is not invertible. What is , and what does this say about the invertibility of ?)
3.6 The Determinant: Characterizing Properties and Their Consequences
3.6.11
Consider the following matrix based on Pascal’s triangle:
Find . (Hint: Row and column reduce.)
Solution:
Consider , then
Then substract row from row , row from row , row from row
Then substract row from row , row from row ,
Then substract row from row ,
So .
This can be generalized for any .
3.8 Geometry of the Determinant: Volume
3.8.1.
(a) This section states that the image of a union is the union of the images. More specifically, let and be any sets, let be any mapping, and let be any subsets of . Show that
Proof
Assume , then we can find , such that .
Then , then , so , .
The other side is similar.
3.8.3.
Describe the geometric effect of multiplying by the elementary matrices , , and .
Solution:
It changes the cubic to parallelepiped.
It changes the cubic to parallelepiped.
It changes the cubic to rectangle.
3.8.4.
3.8.4. (a) Express the matrix as a product of recombine and scale (you may not need both types).
Solution:
Add the first row to the second row.
Then multiply the second row with and add to the first row.
Add the first row to the second row.
(b) Use part (a) to describe counterclockwise rotation of the plane through the angle as a composition of shears and scales.
Solution:
Part (a) just shows the 3 steps of shearing to get it.
3.8.5.
Describe counterclockwise rotation of the plane through the angle (where and ) as a composition of shears and scales.
Solution:
The matrix is
We start with
Scale the 2nd row by , multiply the 1st row by and add to the 2nd row, we have
Then scale the 2nd row by and add to the 1st row, we get
Finally, multiply the 1st row by we get .
3.8.6.
In , describe the linear mapping that takes to , to , and to as a composition of shears, scales, and transpositions.
Solution:
So we just need to have 2 transpositions
3.8.7.
Let be the parallelogram in spanned by and . Calculate directly that
Proof:
Let .
3.8.8.
This exercise shows directly that volume in . Let be the parallelepiped in spanned by , let be spanned by the vectors obtained from performing the Gram–Schmidt process on the 's, let have rows , have rows .
(a) Explain why .
Proof:
So can be transformed from by twice recombine. Therefore .
(b) Give a plausible geometric argument that vol = vol .
Proof:
Consider the parallelogram made of . The area is the same as the rectangle made by . So we can just calculate the parallelepiped made by .
Note it's height is the same as the parallelepiped made by .
Therefore vol = vol .
(c) Show that
Explain why therefore . It follows from parts (a) and (b) that .
Proof
Exercise 3.5.4. shows .
On the other hand,
So .
3.10 The Cross Product, Lines, and Planes in
3.10.5.
(a) Let be skew-symmetric, meaning that and similarly for , where is the transpose of (Exercise3.2.4). Show that is skew-symmetric for every , and that is skew-symmetric.Thus the skew-symmetric matrices form a vector space. Show furthermore that the Lie bracket is skew-symmetric. One can optionally check that although the Lie bracket product is not in general associative, it instead satisfies the Jacobi identity,
Proof:
Note
3.10.11.
Show that and intersect if and only if the linear equation is solvable, where has columns and , is the column vector , and .
For what points and do and intersect?
Proof:
3.10.12.
Use vector geometry to show that the distance from the point to the line is
(Hint: what is the area of the parallelogram spanned by and ?) Find the distance from the point to the line .
Proof:
As shown in the figure below
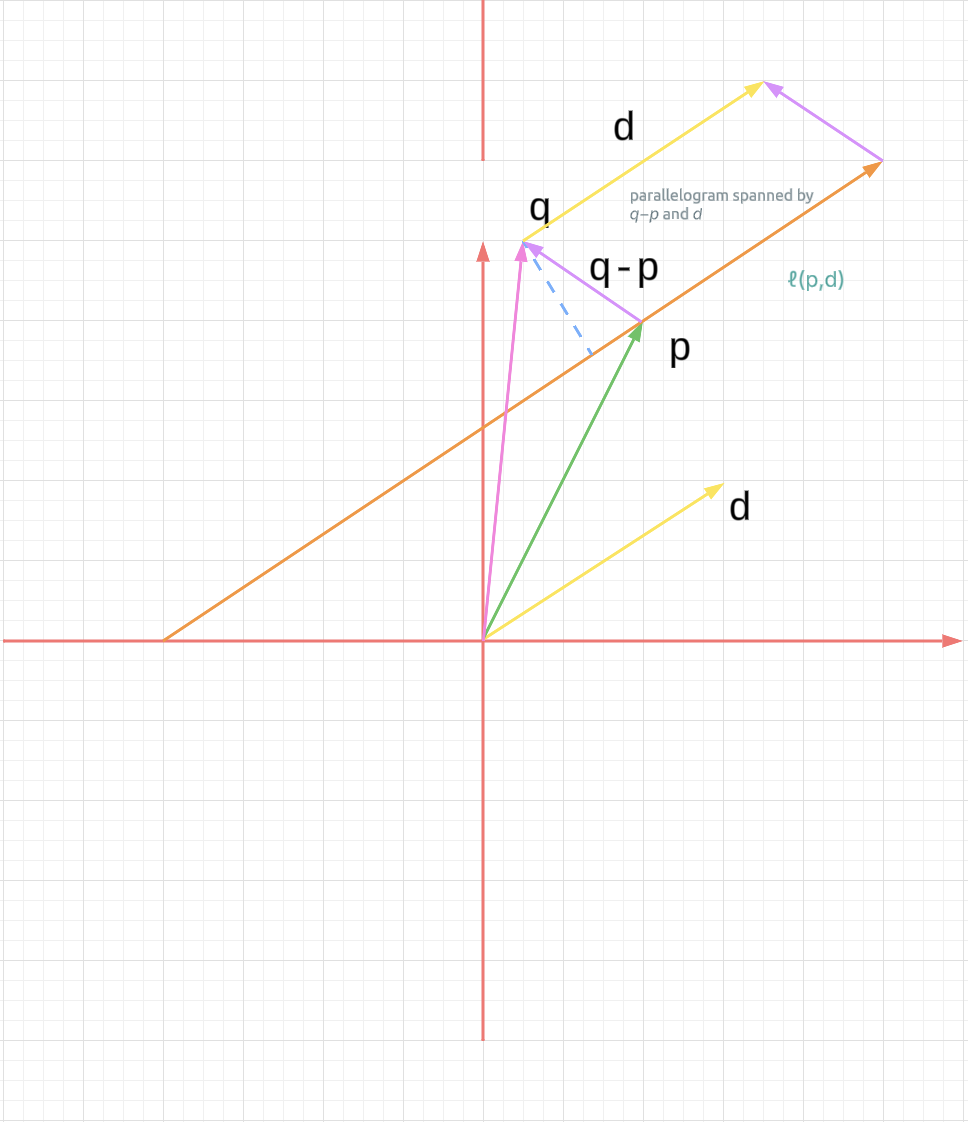
The area of the parallelogram spanned by and is
Then the distance
So
So the distance is
3.10.13.
Show that the time of nearest approach of two particles whose positions are , is . (You may assume that the particles are at their nearest approach when the difference of their velocities is orthogonal to the difference of their positions.)
Proof:
3.10.14.
Write the equation of the plane through with normal direction .
Solution:
3.10.15.
Where does the plane intersect each axis?
Solution:
It intersects with .
3.10.16.
Specify the plane containing the point and spanned by directions and . Specify the plane containing the three points , , and .
Solution:
To find a normal (orthogonal) vector , we have . So, for any , if , then in the plane.
Let , the we just need to have to satisfy:
3.10.17.
Use vector geometry to show that the distance from the point to the plane is
(Hint: Resolve into components parallel and normal to .) Find the distance from the point to the plane .
Solution:
From exercise 2.2.15,
And the distance is