Chapter 2 Euclidean Space
2.1 Algebra: Vectors
Theorem 2.1.1 (Vector space axioms).
(A1) Addition is associative
(A2) 0 is an additive identity
(A3) Existence of additive inverses
(A4) Addition is commutative
(M1) Scalar multiplication is associative
(M2) 1 is a multiplicative identity
(D1) Scalar multiplication distributes over scalar addition
(D2) Scalar multiplication distributes over vector addition
For , is not endowed with vector-by-vector multiplication.
If the vector space axioms are satisfied with and replacing and then we say that is a vector space over .
We can use intrinsic vector algebra to prove a result from Euclidean geometry, that the three medians of a triangle intersect.
Let
Rewrite it as
Note that is the middle point of . Then is the median from to , so is on the median.
Since are symmetric, then is on all 3 medians.
The standard basis of is the set of vectors
So
Definition 2.1.2 (Basis).
A set of vectors is a basis of if every is uniquely expressible as a linear combination of the .
2.2 Geometry: Length and Angle
Definition 2.2.1 (Inner product).
The inner product is a function from pairs of vectors to scalars,
defined by the formula
Proposition 2.2.2 (Inner product properties).
(IP1) The inner product is positive definite: for all , with equality if and only if .
(IP2) The inner product is symmetric: for all
(IP3) The inner product is bilinear:
for all , .
Like the vector space axioms, the inner product properties are phrased intrinsically, although they need to be proved using coordinates. As mentioned in the previous section,intrinsic methods are neater and more conceptual than using coordinates. More importantly:
The rest of the results of this section are proved by reference to the inner product properties, with no further reference to the inner product formula.
Definition 2.2.3 (Modulus).
The modulus (or absolute value) of a vector is defined as
Proposition 2.2.4 (Modulus properties).
(Mod1) The modulus is positive: for all , with equality if and only if .
(Mod2) The modulus is absolute-homogeneous: for all and .
Theorem 2.2.5 (Cauchy–Schwarz inequality).
For all ,
with equality if and only if one of is a scalar multiple of the other.
Note that the absolute value signs mean different things on each side of the Cauchy–Schwarz inequality. On the left side, the quantities and are vectors, their inner product is a scalar, and is its scalar absolute value, while on the right side, and are the scalar absolute values of vectors, and is their product. That is, the Cauchy–Schwarz inequality says:
The size of the product is at most the product of the sizes.
The computation draws on the minutiae of the formulas for the inner product and the modulus, rather than using their properties. It is uninformative, making the Cauchy–Schwarz inequality look like a low-level accident. It suggests that larger-scale mathematics is just a matter of bigger and bigger formulas. To prove the inequality in a way that is enlightening and general, we should work intrinsically, keeping the scalars and and notated in their concise forms, and we should use properties, not formulas.
Proof. The result is clear when , so assume . For every ,
Define
Since is always nonnegative, so has at most one root. Thus by the quadratic formula its discriminant is nonpositive,
So
Equality holds exactly when the quadratic polynomial has a root a, i.e., exactly when for some .
Theorem 2.2.6 (Triangle inequality).
For all ,
with equality if and only if one of is a nonnegative scalar multiple of the other.
Proof:
Equality holds exactly when , or equivalently when and . These hold when one of is a scalar multiple of the other and the scalar is nonnegative.
- While the Cauchy–Schwarz inequality says that the size of the product is at most the product of the sizes, the triangle inequality says:
The size of the sum is at most the sum of the sizes.
Proposition 2.2.7 (Size bounds).
For every ,
Distance Definition
The modulus gives rise to a distance function on Rn that behaves as distance should. Define
by
Theorem 2.2.8 (Distance properties).
(D1) Distance is positive: for all , and if and only if .
(D2) Distance is symmetric: for all .
(D3) Triangle inequality: for all .
Angle Definition
If and are nonzero vectors in , define their angle by the condition
In particular, two nonzero vectors and are orthogonal when . Thus orthogonal to all vectors.
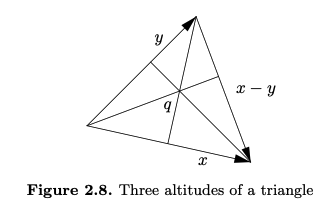
three altitudes must meet
We have
And we want to show
We have
So we have
2.3 Analysis: Continuous Mappings
Mapping from to
A mapping from to is some rule that assigns to each point in a point in . Generally, mappings will be denoted by letters such as .
Mappings as a vector space
For a given dimension , a given set , and a second dimension , let denote the set of all mappings . This set forms a vector space over (whose points are functions) under the operations
defined by
and
defined by
Sequence in
Let be a subset of . A sequence in is an infinite list of vectors in , often written .
Since a vector has entries, each vector in the sequence takes the form .
Definition 2.3.1 (Null Sequence).
The sequence in is null if for every there exists some such that
That is, a sequence is null if for every , all but finitely many terms of the sequence lie within distance of .
- If is a null sequence and or all then also is null.
- and are null sequence, then , so is null.
- is null seq, since
So the set of null sequences in forms a vector space.
A vector sequence is null if and only if the scalar sequence is null.
Lemma 2.3.2 (Componentwise nature of nullness).
The vector sequence is null if and only if each of its component scalar sequences is null.
Proof
Use
Definition 2.3.3 (Sequence convergence, sequence limit).
Let be a subset of . Consider a sequence in and a point . The sequence converges to (or has limit ), written , if the sequence is null. When the limit is a point of , the sequence converges in .
A sequence can only converges to one limit.
Proposition 2.3.4 (Linearity of convergence).
Let be a sequence in converging to , let be a sequence in converging to , and let be a scalar. Then the sequence converges to , and the sequence converges to .
Proof:
So is null. Then .
So is null. Then
Proposition 2.3.5 (Componentwise nature of convergence).
The vector sequence converges to the vector if and only if each component scalar sequence . converges to the scalar .
Proof:
Definition 2.3.6 (Continuity).
Let be a subset of , let be a mapping, and let be a point of . Then is continuous at if for every sequence in converging to , the sequence converges to . The mapping is continuous on (or just continuous when is clearly established) if it is continuous at each point .
Modulus function is continuous
Proof:
Assume , then from exercise 2.2.7
Then is null, i.e. . So is continuous.
The inner product is continuous
Given , define
is continuous.
From Cauchy-Schwarz inequality
Given
Since we know , we have .
jth coordinate function map
Consider the following mapping
Since , this mapping is continuous.
Proposition 2.3.7 (Vector space properties of continuity).
Let be a subset of , let be continuous mappings, and let . Then the sum and the scalar multiple mappings
are continuous. Thus the set of continuous mappings from to forms a vector subspace of .
Proof:
Given , and . Then .
Then from Proposition 2.3.4 (Linearity of convergence), , i.e. . So is continuous.
For the same reason is continuous.
Proposition 2.3.8 (Persistence of continuity under composition).
Let be a subset of , let be a continuous mapping.
Let be a superset of in , and let be a continuous mapping.
Then the composition mapping
is continuous.
Proof:
Given , and . We have .
Since , and is a continuous mapping, we have .
Therefore, is continuous.
Theorem 2.3.9 (Componentwise nature of continuity).
Let , let have component functions , and let be a point in . Then
Proof:
Given any sequence , since is continuous at , then .
From Proposition 2.3.5 Componentwise nature of convergence .
So is continuous at .
Given any sequence , and since is continuous at , then .
From Proposition 2.3.5 Componentwise nature of convergence .
So is continuous at .
Some examples
Consider
Can the constant be specified to make continuous at ?
Take a sequence along the line .
hence cannot be made continuous at .
Now consider
If approaches to with , then
If approaches to with , then
hence cannot be made continuous at .
The size bounds to prove continuity
Consider
Note from 2.2.7, we have , so
So setting makes it continuous at .
Summary of the 3 examples
The straight line test can prove that a limit does not exist, or it can determine the only candidate for the value of the limit, but it cannot prove that the candidate value is the limit.
When the straight line test determines a candidate value of the limit, approaching along a curve can further support the candidate, or it can prove that the limit does not exist by determining a different candidate as well.
The size bounds can prove that a limit does exist, but they can only suggest that a limit does not exist.
Proposition 2.3.10 (Persistence of inequality).
Let be a subset of and let be a continuous mapping. Let be a point of , let be a point of , and suppose that . Then there exists some , such that
Proof:
Assume otherwise, then for , we can find , such that and .
Since is continuous, then . We have a contradiction.
2.4 Topology: Compact Sets and Continuity
Definition 2.4.1 (ε-ball).
For every point and every positive real number , the -ball centered at is the set
Definition 2.4.2 (Limit point).
Let be a subset of , and let be a point of . The point is a limit point of A if every -ball centered at contains some point such that .
Isolated point
Definition 1: A point in that is not a limit point of .
Definition 2: Equivalently, is an isolated point of if and there exists some such that .
Lemma 2.4.3 (Sequential characterization of limit points).
Let be a subset of Rn, and let be a point of . Then is the limit of a sequence in with each if and only if is a limit point of .
Proof:
Given , since , we can find , such that , , i.e. . Since , then is a limit point of .
Assume is a limit point of , let . Let , and . We can find . This process can continue infinitely. Then we find a .
Definition 2.4.4 (Closed set).
A subset of is closed if it contains all of its limit points.
Proposition 2.4.5 (Sequential characterization of closed sets).
Let be a subset of . Then is closed if and only if every sequence in that converges in in fact converges in .
Proof:
Assume and , if for some , then .
If , then is a limit point of . Since is closed, so .
Assume is a limit point of , then from Lemma 2.4.3 , we can find and . Then , so is closed.
Definition 2.4.6 (Bounded set).
A set in is bounded if for some .
Proposition 2.4.7 (Convergence implies boundedness).
If the sequence converges in then it is bounded.
Definition 2.4.8 (Subsequence).
A subsequence of the sequence is a sequence consisting of some (possibly all) of the original terms, in ascending order of indices.
Lemma 2.4.9 (Persistence of convergence).
Let converge to . Then every subsequence also converges to .
Theorem 2.4.10 (Bolzano–Weierstrass property in ).
Let be a bounded subset of . Then every sequence in has a convergent subsequence.
Proof: This is just a summary. Define the max-point if it is at least as big as all later terms, i.e., for all .
If there are infinitely many max-points in then these form a decreasing sequence. If there are only finitely many max-points then has an increasing sequence starting after the last max-point.
Theorem 2.4.11 (Bolzano–Weierstrass property in : sequential characterization of bounded sets).
Let be a subset of . Then is bounded if and only if every sequence in has a subsequence that converges in .
Proof:
Use 2.4.10 on every index.
Proof by contradiction.
Note how the sequential characterizations in Proposition 2.4.5 > and in the Bolzano–Weierstrass property complement each other.
The proposition characterizes every closed set in by the fact that if a sequence converges in the ambient space then it converges in the set.
The Bolzano–Weierstrass property characterizes every bounded set in by the fact that every sequence in the set has a subsequence that converges in the ambient space but not necessarily in the set.
Both the sequential characterization of a closed set and the sequential characterization of a bounded set refer to the ambient space in which the set lies.
Definition 2.4.12 (Compact set).
A subset of is compact if it is closed and bounded.
Theorem 2.4.13 (Sequential characterization of compact sets).
Let be a subset of . Then is compact if and only if every sequence in has a subsequence that converges in .
Proof:
Since its bounded we can use the Bolzano–Weierstrass property. And since it's closed, it converges in .
Just use the of 2.4.5 and 2.4.11.
By contrast to the sequential characterizations of a closed set and of a bounded set, the sequential characterization of a compact set makes no reference to the ambient space Rn in which lies.
A set’s property of being compact is innate in a way that a set’s property of being closed or of being bounded is not.
Theorem 2.4.14 (The continuous image of a compact set is compact).
Let be a compact subset of and let be continuous. Then , the image set of under , is a compact subset of .
Proof:
Let , we can find , such that . Since is compact, then we can find subsuquence . Since is continuous, then . And is subsequence of .
So is also compact.
Theorem 2.4.15 (Extreme value theorem).
Let be a nonempty compact subset of and let the function be continuous. Then takes a minimum and a maximum value on .
Proof:
is compact in , so it has a greatest lower bound and a least upper bound by the completeness of the real number system.
If is not a limit point of and , then we can find such that . That means, is another lower bound. We got a contradiction.
So is either an isolated point or a limit point of .
Topological property
A topological property of sets is a property that is preserved under continuity. Theorem 2.4.14 says that compactness is a topological property. Neither the property of being closed nor the property of being bounded is in itself topological. That is, the continuous image of a closed set need not be closed, and the continuous image of a bounded set need not be bounded; for that matter, the continuous image of a closed set need not be bounded, and the continuous image of a bounded set need not be closed (Exercise 2.4.8).
The nomenclature continuous image in the slogan-title of Theorem 2.4.14 and in the previous paragraph is, strictly speaking, inaccurate: the image of a mapping is a set, and the notion of a set being continuous doesn’t even make sense according to our grammar. As stated correctly in the body of the theorem, continuous image is short for image under a continuous mapping.